
aýlanýan çarçuwanyň funksiýasynyň özgerdilmegi

















Awtomatiki umumy düşüriji enjam

Önümiň aýratynlyklary
Awtomatiki köpçülikleýin doňdurma enjamy egirme prosesinde awtomatiki doňdurma, awtomatiki dolandyryş we awtomatiki doly turba daşamak meselesini çözýär. Zähmeti azaldyň, zähmetiň intensiwligini azaldyň, egirme awtomatizasiýa derejesini ýokarlandyryň, zähmet öndürijiligini ýokarlandyryň, önümiň çykdajylaryny azaldyň.
Önümiň artykmaçlygy
Dokmak görkezijileri: dokmak wagty 3 minut, dolandyryş wagty 25 minut, intubasiýa tizligi 98%, Dekannulýasiýa tizligi 98%, ýüplügiň ätiýaçlyk tizligi ≥98%.
Maýa goýumdan girdeji: mysal üçin, umumy doffer enjamyny gurnandan soň, 6-12 sekuntlyk ýüplük egirmek üçin, öz çykdajylaryny tölemek üçin diňe 2 ýyl gerek bolýar.
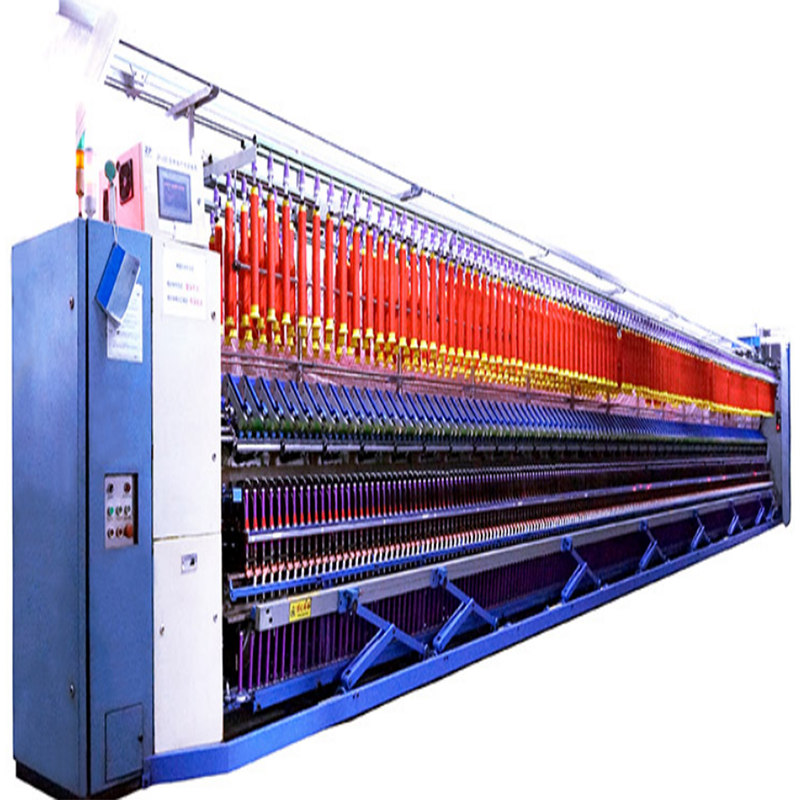
Özekden egrilen ýüplük / goşa özekden egrilen ýüplük enjamy


Özekden egirilen ýüplük we goşa özekden egirilen ýüplük enjamy ähli halkaly egirme çarçuwalary bilen utgaşyklydyr. Goşa filament işjeň iýmitlendirme görnüşini kabul edýär.
Ulanylyş çägi: Pagta, kenep, himiki süýüm we ş.m. üçin S-60s spandeks elastik özenli egri ýüplük we pagta özenli egri ýüplük T400+ spandeks iki özenli egri ýüplük, ýüplük sany 6s-30s aralygynda; şeýle hem az elastik sintetiki süýümler bilen egrilip bilner.
Spandeks özenli egrilen ýüplügiň we filament özenli egrilen ýüplügiň her biriniň serwo hereketlendirijisi bar, şonuň üçin iki özenli egrilen ýüplük birmeňzeş iýmitlenýär we şol bir iýmitlenme gatnaşygyny üpjün edýär.
Spandeksiň çekiş gatnaşygyny 1,3-den 5 esse çenli, filamentiň çekiş gatnaşygyny bolsa 1-den 2 esse çenli sazlap bolýar. Özen aýlamak prosesi reňkli sensor ekran arkaly girizilýär.
Spandeks sim ýol görkeziji sterženi sowuk çekilen tikinsiz kompozit turbadan, filament sim ýol görkeziji rulon bolsa inçe üwemek arkaly tikinsiz polat turbadan ýasalýar. Ýüzü ýörite işlenip, dartgynlyk gatnaşygy durnukly bolup, ýüplügiň hilini üpjün edýär.
Egirme çarhy çeýe we durnukly, ýüplügiň hili bolsa gowy. Ýol görkeziji çarhyň ýerleşýän ýerini düwmäni sazlamak arkaly gorizontal ýagdaýda süýşürip bolýar; Ýol görkeziji sim çarhynyň beýikligi sazlanyp bilner we özen siminiň iýmitlendirme burçy sazlanyp bilner, bu bolsa dürli özen bilen örtülen ýüplük görnüşleriniň talaplaryna laýyk gelip, ony ideal işleýiş ýagdaýyna getirip biler.
Ýol görkeziji çybyk, ýol görkeziji tigir gara, gara we ak reňkde bolup, synlamak we ulanmak aňsat, boş ýüplügiň öňüni netijeli alýar.
Slub ýüplük enjamy


Önümiň aýratynlyklary
Slub ýüplük bölümi/reňkli ýüplük enjamy F1520, F1516, FA506, FA502 we ş.m. eriş we argaç egirme maşynlaryna gurnalyp bilner.
Şanhaý No2 egirme maşyn.EJM138LD (uzyn awtoulag), EJM128K, FA503, FA507; Germaniýa ZINSER 319SL, ZINSER 360, ZINSER R71; Germaniýa RIETER G32, K44 we beýleki egirme çarçuwasy.
Slub ýüplük enjamy adaty slub ýüplügini, düzgünsiz slub ýüplügini, slubly slub ýüplügini, tüýli proporsiýany, köp derejeli tüýli, tötänleýin gymmaty we ş.m. slub ýüplügini eğip bilýär. Slub ýüplüginiň uzynlygy 25 mm-den ýokary, slublaryň arasyndaky aralyk 30 mm-den ýokary, slubyň galyňlygy 50-600%.
Önümiň artykmaçlygy
Arzan tehnologiýa, ýokary takyklyk, senagatda gazanylan doly maşyn dinamiki tötänleýin yzarlama tehnologiýasy
Ol PLC şina dolandyryş ulgamyny ulanýar we jogap tizligi 1ms-e ýetýär, bu bolsa ulag açyk ýa-da öçürilende ýa-da tizlik üýtgeýän mahaly ýüplügiň durnukly hilini üpjün edýär. Ol, esasanam, esasy hereketlendirijiniň ýygylygyny öwürmek tizligini sazlamak üçin amatlydyr.
Ajaýyp reňkli sensor ekranly adam-maşyn interfeýsi, proses girişini, redaktirlemegini we görkezilmegini dowam etdirip bilýär, ýönekeý we düşnükli işleýiş.
Elektrik togunyň kesilmeginden goranmak funksiýasy: sargyt edilende elektrik togunyň birden kesilmegi ýagdaýynda üznüksiz ýüplügiň başynyň funksiýasy hökmany däl.
Öndürijilik we artykmaçlyklary: ygtybarly öndürijilik, ulanmak aňsat.
Tejribeli inženeri ýüplük hünäri boýunça okuw geçirmek üçin iberiň, Paket bilim paketi
Bölüm reňkli ýüplük enjamy

Önümiň aýratynlyklary
Öz ýüplüginiň dürlüligi, üç ölçegli duýgusy we baý reňk üýtgemeleri sebäpli bölek reňkli ýüplük geýim matalarynda giňden ulanylýar.
Bölüm reňkli ýüplük iki görnüşden köp çig mal (reňk) bilen aýlanýar. Aýlawyň esasy göwde hökmünde üznüksiz berilmegi, egirme çarçuwasyna reňkli ýüplük enjamynyň bir bölegini goşmak arkaly amala aşyrylýar. Aýlawyň başga bir görnüşi kömekçi ýüplügiň aralykly iýmitlendirilmegi we reňk, reňk nokady, slub bölegi bilen ýeke ýüplügiň emele getirilmegidir. Önümçilik wagtynda bir motor ortaky rulony we yzky rulony aýratyn hereketlendirýär: ortaky rulony üznüksiz iýmitlendirmek we yzky rulony aralykly iýmitlendirmek.
Önümiň artykmaçlygy
Arzan tehnologiýa, ýokary takyklyk, senagatda gazanylan doly maşyn dinamiki tötänleýin yzarlama tehnologiýasy
Ol PLC şina dolandyryş ulgamyny ulanýar we jogap tizligi 1ms-e ýetýär, bu bolsa ulag açyk ýa-da öçürilende ýa-da tizlik üýtgeýän mahaly ýüplügiň durnukly hilini üpjün edýär. Ol, esasanam, esasy hereketlendirijiniň ýygylygyny öwürmek tizligini sazlamak üçin amatlydyr.
Ajaýyp reňkli sensor ekranly adam-maşyn interfeýsi, proses girişini, redaktirlemegini we görkezilmegini dowam etdirip bilýär, ýönekeý we düşnükli işleýiş.
Elektrik togunyň kesilmeginden goranmak funksiýasy: sargyt edilende elektrik togunyň birden kesilmegi ýagdaýynda üznüksiz ýüplügiň başynyň funksiýasy hökmany däl.
Öndürijilik we artykmaçlyklary: ygtybarly öndürijilik, ulanmak aňsat.
Tejribeli inženeri ýüplük hünäri boýunça okuw geçirmek üçin iberiň, Paket bilim paketi
Örän çeýe enjam


Önümiň aýratynlyklary
Adamlaryň geýim matalaryna we trikotaž matalaryna bolan talaplarynyň gowulanmagy bilen, mata bazarynyň önümleri kem-kemden diwersifikasiýalaşýar; Soňky ýyllarda ajaýyp ýumşaklygy, howa geçirgenligi, çyglylygy siňdirişi we ter geçirgenligi üçin örän çeýe ýüp sport we dynç alyş geýimlerinde giňden ulanylýar. Bazar meýiline görä, örän çeýe ýüp pes momentli örän çeýe elastik jinsi matasyna ulanylýar we pes momentli elastik örän çeýe jinsi matasynyň bir görnüşi işlenip düzüldi, ol hem örän ýumşak pagta elastik matasynyň ýumşak we rahat duýgusy, hem-de ýokary elastik galyplama, çyglylygy siňdiriş we ter, howa geçirgenligi we guraklygy bilen häsiýetlendirilýär. Jins eşiklerinden ýasalan, geýýän adama köp sanly rahatlyk berip biler.
Önümiň artykmaçlygy
Örän çeýe ýüplük egirilende, asyl egirme esasynda, burulmany 10% azaldyň, berklik asyl maglumatlary saklap biler, CV güýjüni ýokarlandyrýar, saçlary takmynan 30% gowulaşdyrýar, ýüplügiň ýumşaklygy has aýdyň bolýar, şpindel tizligi üýtgewsiz, çykyş 10% ýokarlanýar!
Ilkinji egirme esasynda, burulmany 20%-25% azaltmak berkligi takmynan 10% peselder (çig pagtanyň görnüşini gowulandyrmak arkaly berkligi ýokarlandyryp bolýar we asyl ýüplügiň berkligi üýtgewsiz galýar), şpindeliň tizligini 10% peselder we önümçiligi 10% artdyrar.
Bularyň hemmesi önümçiligi 10% artdyryp, maýa goýumyň girdejililik möhleti 3 aý bolup biler we täze ýüplük görnüşlerini goşup biler!
Slub super çeýe ýüp, özen super çeýe ýüp, tekiz super çeýe ýüp, siro ykjam super çeýe ýüp we ş.m. eğilip bilýär! Giňden ulanylýar!
Üýtgeşiklikleriň sany we üýtgeşiklikleriň sany bilen öwrülýän ýüplük enjamy


Önümiň aýratynlyklary
Bazaryň isleglerini kanagatlandyrmak üçin, biziň kompaniýamyz üýtgeýän burulma enjamyny akylly işläp düzýär.
Ol bir wagtyň özünde üç rolikiň tizligini üýtgedip bilýär, öňdäki rolik, orta we yzky rolikler degişlilikde iki serwo motor tarapyndan herekete getirilýär, olar dürli proseslere görä dürli öňdäki rolik tizligini we orta we yzky rolik tizligini öndürip bilýär. Bu enjam asyl slub ýüplük enjamynyň ähli funksiýalaryna eýedir we örän uzyn we uly köp sanly slub we ultragysga slub aýlap bilýär.
Önümiň artykmaçlygy
Asyl aýlanýan çarçuwanyň hereketlendiriji ulgamynda ilki orta we yzky roliklar, şeýle hem öňdäki roliklar aýrylýar, degişlilikde iki serwo motor gurnalýar.
Servo motor orta we yzky rolikleri herekete getirýär, başga bir servo motor öňdäki roliki herekete getirýär. Enkoder enjamyň kellesiniň esasy walyna gurnalýar.
Dolandyryş şkafy (PLC dolandyryş ulgamy) maşynyň kellesiniň ýokarky bölegine gurnaldy we slabyň bulanyk sanynyň, burulmagynyň, uzynlygynyň, galyňlygynyň we dykyzlygynyň we beýleki tehniki parametrleriň makul dizaýny bar.
Üýtgeşiklikleriň sany we üýtgeşiklikleriň öwrülmegi bilen baglanyşykly şlak ýüplük enjamy esasy ýüplügiň we şlak ýüplügiň egirme prosesinde dürli öwrüliş almagyny, esasy ýüplügiň has uly öwrüliş almagyny we şlak ýüplügiň has kiçi öwrüliş almagyny üpjün etmek üçin ulanylýar, şeýlelik bilen şol bir ýüplükde esasy ýüplügiň we şlak ýüplügiň arasyndaky öwrülişleriň rasionallaşdyrylmagyny we diwersifikasiýasyny amala aşyrýar.
Elektron bobin emele getirmek ulgamy

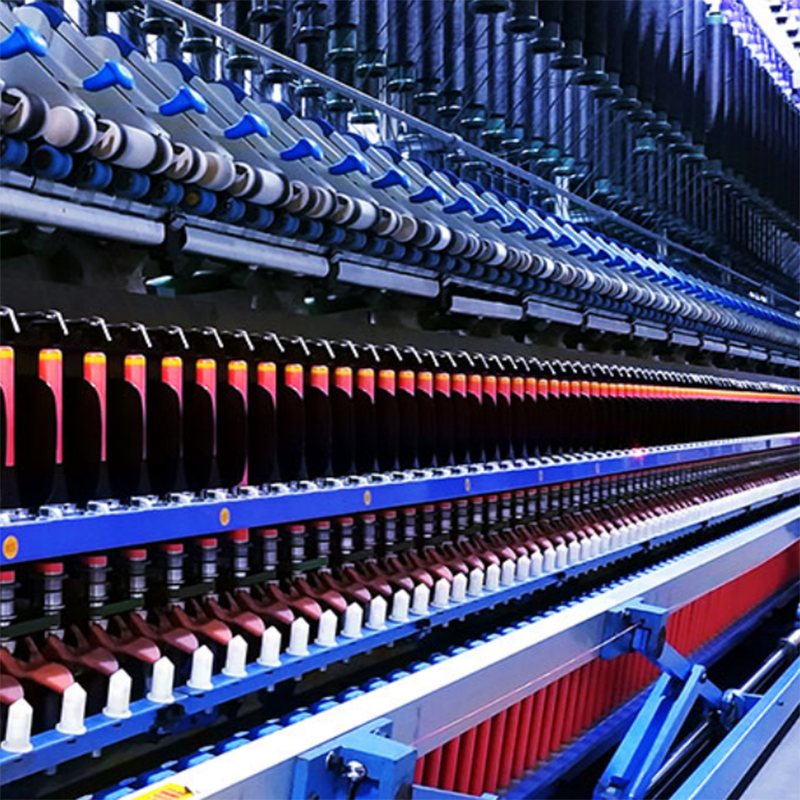
Önümiň aýratynlyklary
Ulgam kompýuter torunyň gözegçiligini, aýlanýan çarçuwanyň iş ýagdaýyny real wagt režiminde gözegçilik etmegi, çykyşyň real wagt režiminde statistikasyny, proses parametrlerini we beýleki dolandyryş maglumatlaryny, awtomatiki önümçilik hasabatyny we seljermesini, amatly dolandyryşy amala aşyryp biler. Şeýle hem, mobil telefon APP programma üpjünçiligi, näsazlyklary çözmek üçin amatly önümçilik işgärleri we dolandyryş işgärleri real wagt režiminde gözegçilik edip bilerler.
Önümiň artykmaçlygy
QD200-iň elektron göteriji ulgamy servo dolandyrylýan polat ýaka plastinkasyny ulanýar, ol birmeňzeş ýumşak işleýär, turba ýüplüginiň kuwwaty ep-esli artýar, gysga iş aralygy bolsa azalýar we ol halkadan çykmaz. Servo dolandyryş programmasy arkaly tizligi ýokarlandyrýar we peseldýär, sürüş wagtynda başyň döwülmegi hadysasyny netijeli gowulandyrýar. Parametrleri özbaşdak sazlap bolýar, hakykatdanam energiýany tygşytlamagy, zähmeti tygşytlamagy we çykdajylary tygşytlamagy gazanýar.
QD200 elektron CAM aýlanýan çarçuwanyň ähli aýratynlyklary bilen deňeşdirilip bilner, Elektron CAM köne maşynyň asyl mehaniki CAM özgerdilmesiniň ornuny hem tutup biler.
Pagta egirme onlaýn ýeke şpindel synagy


Önümiň aýratynlyklary
Egirme çarçuwasynda ýeke şpindelli onlaýn gözegçilik hereket edýän awtomatiki durma ulgamynyň ulanylmagy egirme önümçiligini dolandyrmak we çykdajylar bilen gönüden-göni baglanyşykly birnäçe taslamalary öňe ilerletmäge mümkinçilik berýär, ol diňe bir egirme önümçiligini dolandyrmak we dolandyrmak netijeliligini ýokarlandyrmak üçin netijeli kömekçi gural bolmak bilen çäklenmän, eýsem geljekde egirmede tor arkaly intellektual baglanyşyk we zähmeti azaltmak üçin möhüm platformadyr.
Önümiň artykmaçlygy
Polat ýaka plastinkasyna fotoelektrik datçigi gurnamak arkaly, sim halkasy aýlanýan wagty signal anyklanýar we sim halkasynyň tizlik maglumaty alynýar, bu bolsa ýüplügiň döwülendigini ýa-da döwülmändigini anyklap biler. Eger ýüp döwülse, süýşmegi bes edýän enjam süýşmegi 2 sekuntyň içinde döwmek üçin dolandyrylýar. Şeýlelik bilen, el bilen edilýän işleriň ýerine çalt barlagy tamamlap bolýar we uçlary döwülen süýşmegi çalt aýryp bolýar.
CNC başlyklarynyň doly özgerdilmegi


Önümiň aýratynlyklary
CNC baş böleginiň tutuş düzümi öň, orta we yzky roliklerden, serwo göni hereketlendirijili polat ýaka plastinkasyndan, ýygylyk öwrüji hereketlendirijili esasy motordan ybarat bolup, sensor ekran sazlamalaryny üýtgedip bolýança prosesi üýtgedip bolýar, indi dişlini çalşyrmagyň zerurlygy ýok. Bu, ýumşak ýüplügi, reňkli ýüplügi, üýtgeýän sany we üýtgeýän burulmany we elektron götermegi öz içine alýan akylly egirme ulgamydyr. Ähli proses üýtgeşmeleri displeý ekranynda hiç hili proses dişlisini çalşyrmazdan amala aşyrylýar. Ýönekeý we amatly işleme, ýokary netijelilik we energiýa tygşytlaýyş.
Önümiň artykmaçlygy
Ulgam kompýuter torunyň gözegçiligini, egirme maşynynyň iş ýagdaýynyň real wagt režiminde gözegçilik edilmegini, çykyşyň real wagt režiminde statistikasyny, proses parametrlerini we beýleki dolandyryş maglumatlaryny amala aşyryp biler, önümçilik hasabatlaryny we seljermeleri awtomatiki usulda döredip biler, kärhana dolandyryşy üçin amatlydyr we önümçilik işçileriniň näsazlyklary çözmekleri we dolandyryş işgärleri üçin real wagt režiminde gözegçilik etmek üçin amatly bolan ykjam telefon APP programma üpjünçiligi bilen birikdirilip bilner.





